
Entirely Soft Sensing and Actuation Modules for Programming Shape Changes through Tangible Interaction
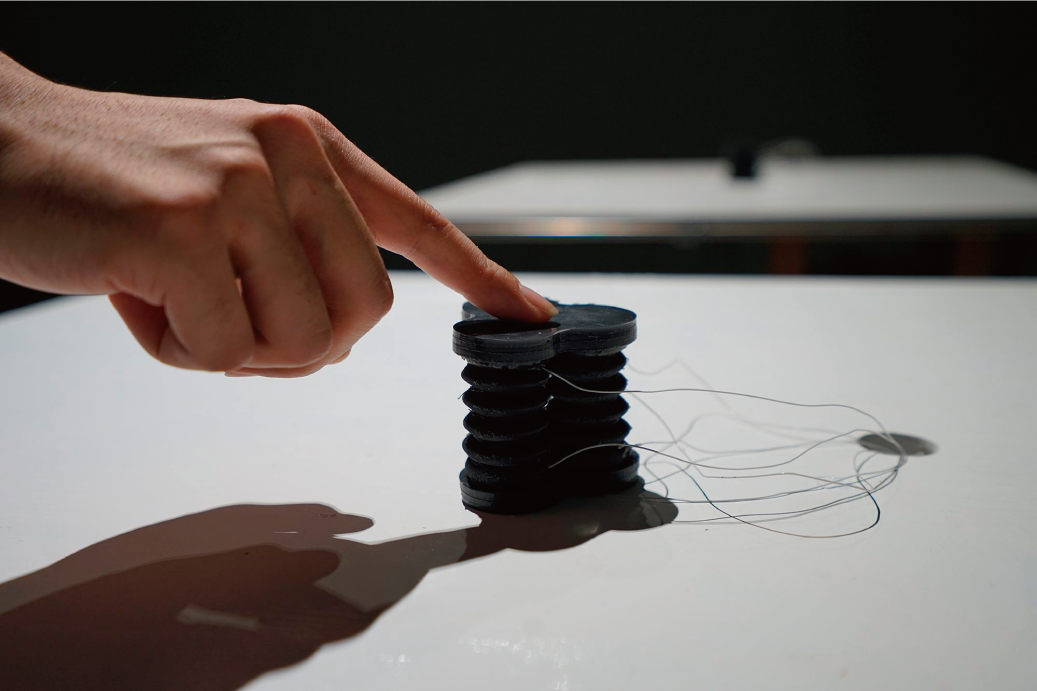
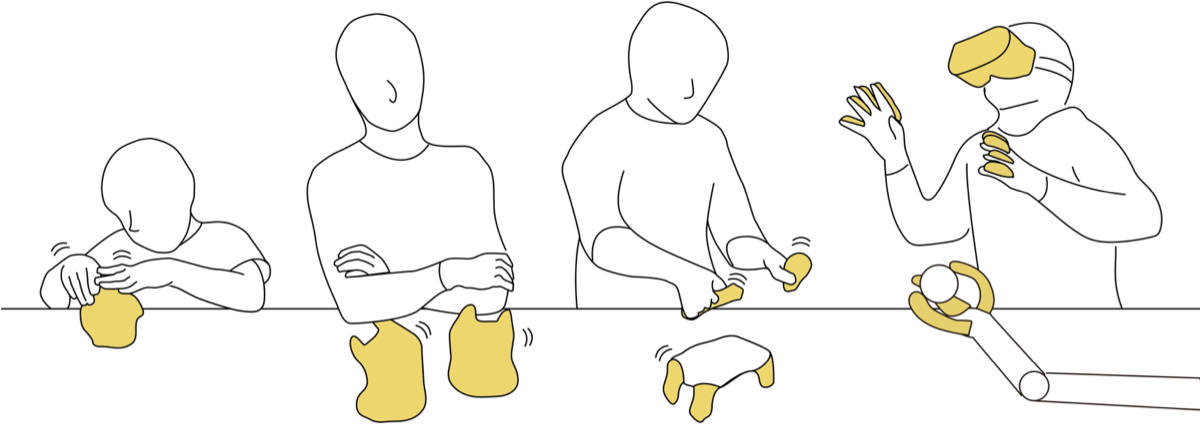
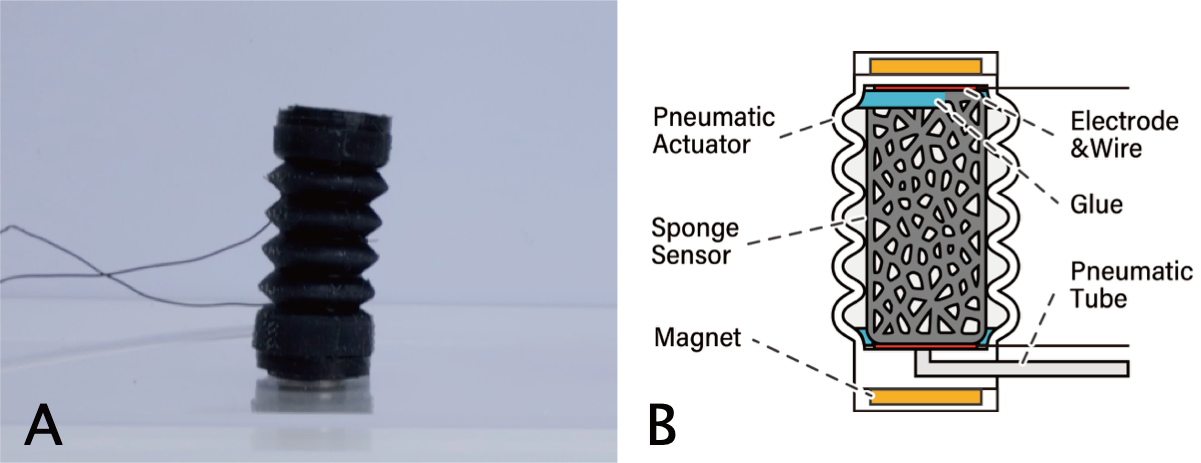
We introduce MorphIO, entirely soft sensing and actuation modules for programming by demonstration of soft robots and shape-changing interfaces. MorphIO’s hardware consists of a soft pneumatic actuator containing a conductive sponge sensor. This allows both input and output of three-dimensional deformation of a soft material. Leveraging this capability, MorphIO enables a user to record and later playback physical motion of programmable shape-changing materials. In addition, the modular design of MorphIO’s unit allows the user to construct various shapes and topologies through magnetic connection. We demonstrate several application scenarios, including tangible character animation, locomotion experiment of a soft robot, and prototyping tools for animated soft objects. Our user study with six participants confirms the benefits of MorphIO, as compared to the existing programming paradigm.
本研究では,ロボットなど物理的な実体を有するオブジェクトに対する動きや振る舞いをデザインする手法を提案する。映画や産業の分野を中心にロボットの動きや振る舞いもコンピュータの制御によって飛躍的にその表現力を高めてきた。この様なロボットがモーターやギアを用いたメカトロニクスを活用している一方で、近年は柔らかい素材や機構を用いたロボットが盛んに研究されている。これらはソフトロボットと呼ばれ、周囲との衝突などに際して安全であることや、またより生き物らしい動きを表現する手段としても注目されている.
しかし、この様な柔らかな構造を有するロボットはその動きを設計するためのノウハウが少なく、所望の動きを実現するのが容易ではないという問題がある。MorphIOは全体が柔らかい素材で構成された手動作によって動きをプログラミングする変形インタフェースである。空気圧駆動の柔らかい筐体の内部に伸縮性の導電スポンジセンサを組み入れた構成をしており、変形の状態を記録することができる。設計者はMorphIOを手作業で変形させることで振る舞いを記録させ、システムによりその変形状態を再現することで、柔らかなロボットの動きを設計することができる。
Related information
Publication
Nakayama, R., Suzuki, R., Nakamaru, S., Niiyama, R., Kawahara, Y., & Kakehi, Y. (2019, June). MorphIO: Entirely Soft Sensing and Actuation Modules for Programming Shape Changes through Tangible Interaction. In Proceedings of the 2019 on Designing Interactive Systems Conference (pp. 975-986). ACM.
Contribution
本プロジェクトは主にRyosuke Nakayama氏とRyo Suzuki氏によって進められた. 私はハードウェアのセンシングとSoftnessを両立させる構成や伸縮性導電性インクの組成についてFoamSenseの知見を元にサポートを行なった.
Award
Best Paper Award DIS’19